热点资讯
其他资讯
胡家坝镇新设备轮轴式PLFS120-L3-100-S2-P2斜齿行星齿轮箱
文章来源:ymcdkj
发布时间:2024-04-30 09:16:01
0-S2-P2斜齿行星齿轮箱
使用压缩空气扫探头必须保证压缩空气中不含有水分,即对所采用的压缩空气必须进行气水分离。化锆测氧仪的使用和维护5.1连接加热控制采样检测式探头只有在氧化锆测氧仪连接了加热控制后才能正常工作,冷态下输出的是随机信号,不代表任何意义。氧化锆测氧仪在接人加热控制后,在室温条件下既可以始正常的气体检测。一般探头调零是在室温下,加热探头后,通过对空气的测量,用数字万用表测量此时探头输出毫伏值,此数值就是该探头的零位偏差数值,在显示仪表中需要加入该零位偏差来修正仪表显示的氧浓度。2新装或更换氧化锆测氧仪时 新装或更换氧化锆测氧仪时,均应校正氧分析仪的氧浓度显示值。不进行此项工作,更换新的传感器后,检测的氧浓度可能会与实际浓度产生偏差,从而影响测量精度。3氧浓度的修正原理及方法氧传感器直接测量输出的是被测气体的浓度与标准空气差电势数值,称为氧电势。该电势数值在零点(即空气测量)时,不同的探头起始输出电势就存在偏差,而输出电势经过模型转换输出氧浓度时也可能存在误差。
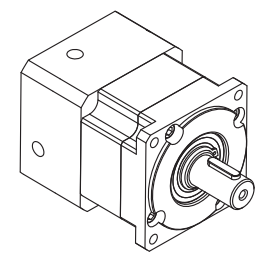
胡家坝镇新设备:轮轴式PLFS120-L3-100-S2-P2斜齿行星齿轮箱
行星减速机一般用于低转速大扭矩的传动设备,把电动机.内燃机或其它高速运转的动力通过行星减速机的输入轴上的齿数少的齿轮啮合输出轴上的大齿轮来达到减速的目的,普通的行星减速机也会有几对相同原理齿轮达到理想的减果,大小 齿轮的齿数之比,就是传动比。
胡家坝镇新设备:轮轴式PLFS120-L3-100-S2-P2斜齿行星齿轮箱
如今,机器人产业的增长如火如荼,遍地花,大量机床厂家、伺服厂家和其他有条件的企业都纷纷转向机器人市场。为何机床厂家和伺服厂家如此积极转型研发机器人?工业机器人有4大组成部分,分别为本体,伺服,减速器和控制器。
步进电机用于驱动机器人的关节,要求是要有功率质量比和扭矩惯量比、高启动转矩、低惯量和较宽广且平滑的调速范围。
机器人产业壮大,需要在伺服、集成控制等领域相继取得突破才能成行。目前,我国在伺服等领域依然处于待突破阶段,对本土机器人产业造成不利影响。
行星减速机是一种应用广泛的减速机,它的主要传动结构为:行星轮,太阳轮,外齿圈,并合着线针齿啮合的转动方式来工作。 由于减速机的这种转动结构,使得它的单级减速一般在3-10 行星减速机是由针齿啮合来工作转动的,由于行星齿轮的套数一套齿轮无法满足较大的传动比,有时需要2套或者3套来满足拥护较大的传动比的要求,但同时2级或3级减速机的长度会有所增加,导致效率会有所下降。 前面说过它主要传动结构为:行星轮,太阳轮,外齿圈 ,使得行星减速机多数是在步进电机和伺服电机上,行星我们都知道行星是围绕着太阳运动的有着不同的轨迹方式,同样行星减速机的这种结构也决定了它的几种不同工作转动方式: 1)太阳轮固定,齿圈主动,行星架被动,它的转向相同这种组合为降 圈固定,行星架主动,太阳轮被动,它的转向相同这种组合为升速传动,传动比一般为0.2~0.4 3)齿圈固定,太阳轮主动,行星架被动,它的转向相同这种组合为降速传动,通常传动比一般为2.5~5 4)太阳轮固定,行星架主动,齿圈被动,它的转向相同这种组合为升速传动,传动比一般为0.6~0.8 5)行星架固定,齿圈主动,太阳轮被动,它的转向相反这种组合为升速传动,传动比一般为0.25~0.67 6)行星架固定,太阳轮主动,齿圈被动,它的转向相反这种组合为降速传动,传动比一般为1.5~4 由于结构的原因,使得它的传动种类不同能广泛应用于各类传动机械行业中。
胡家坝镇新设备:轮轴式PLFS120-L3-100-S2-P2斜齿行星齿轮箱
+< -K5-19/70
现代具就是为这种需求服务的高精度、率、高可靠性和专用化的具。我们认为,尽管全球经济会有周期性变化和动荡。但业向转移的大格局,是基于全球化背景下资源优化配置的客观需要,不会出现逆转。目前,业的产出价值量大体介于日、美之间,但在实物产出水平,已大大超过日、美。我国已连续5年机床消费量居全球。7年我国机床拥有量已达5万台,远远超过发达 ,数控机床达6万台,数量和日、美相当,但档次偏低。